Qui ?
Groupe d'étudiants de l'université Claude Bernard - Lyon 1 (dans l'ordre alphabétique) :
- Areg Baghinyan
- Pierre-loup Barazzutti
- Nolan Declercq
- Aurelien Grivollat
- Romane Lhomme
- Yoann Maret-verdant
- Adam Sooga
- Cyril Veve
Quoi ?
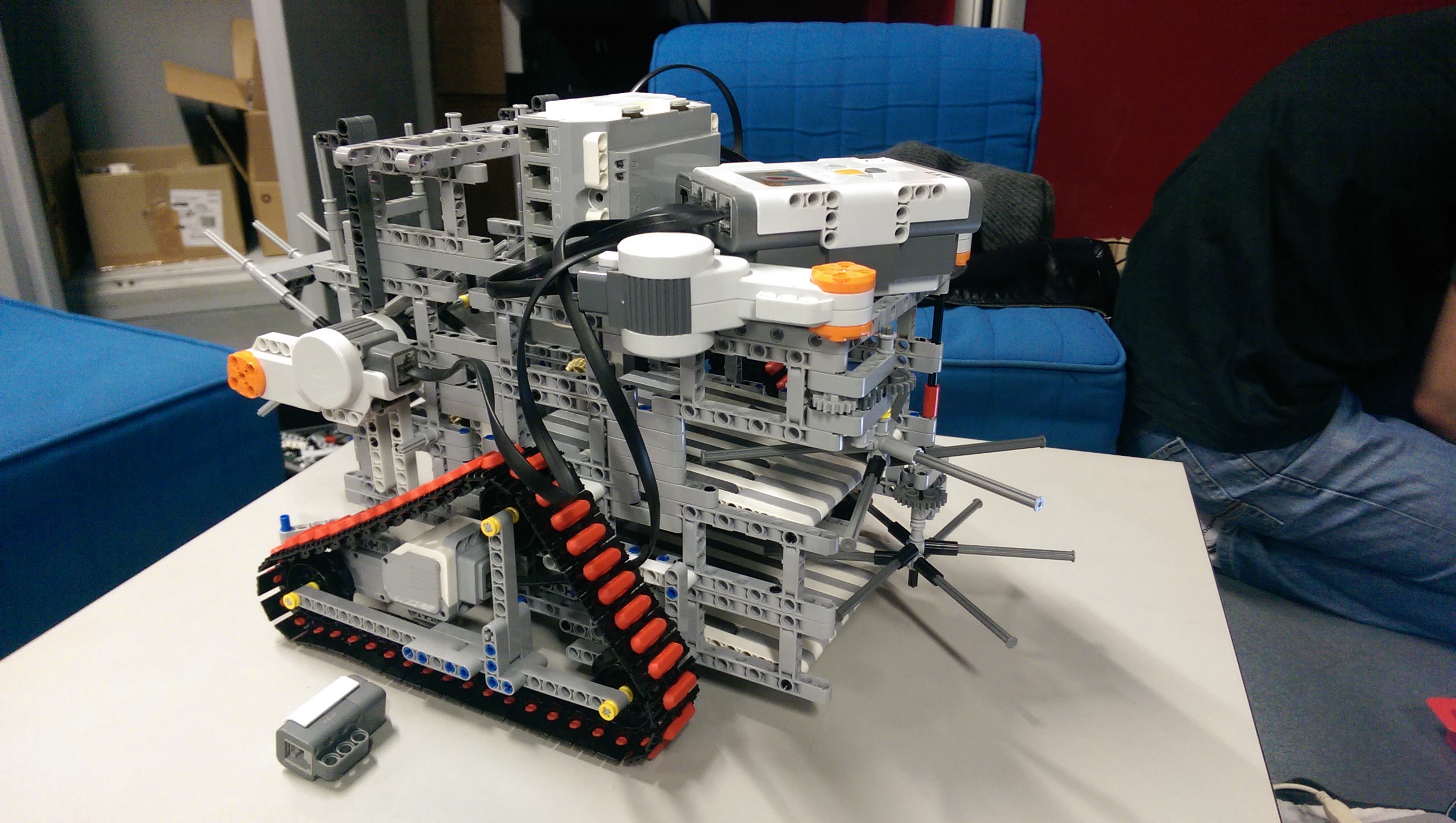
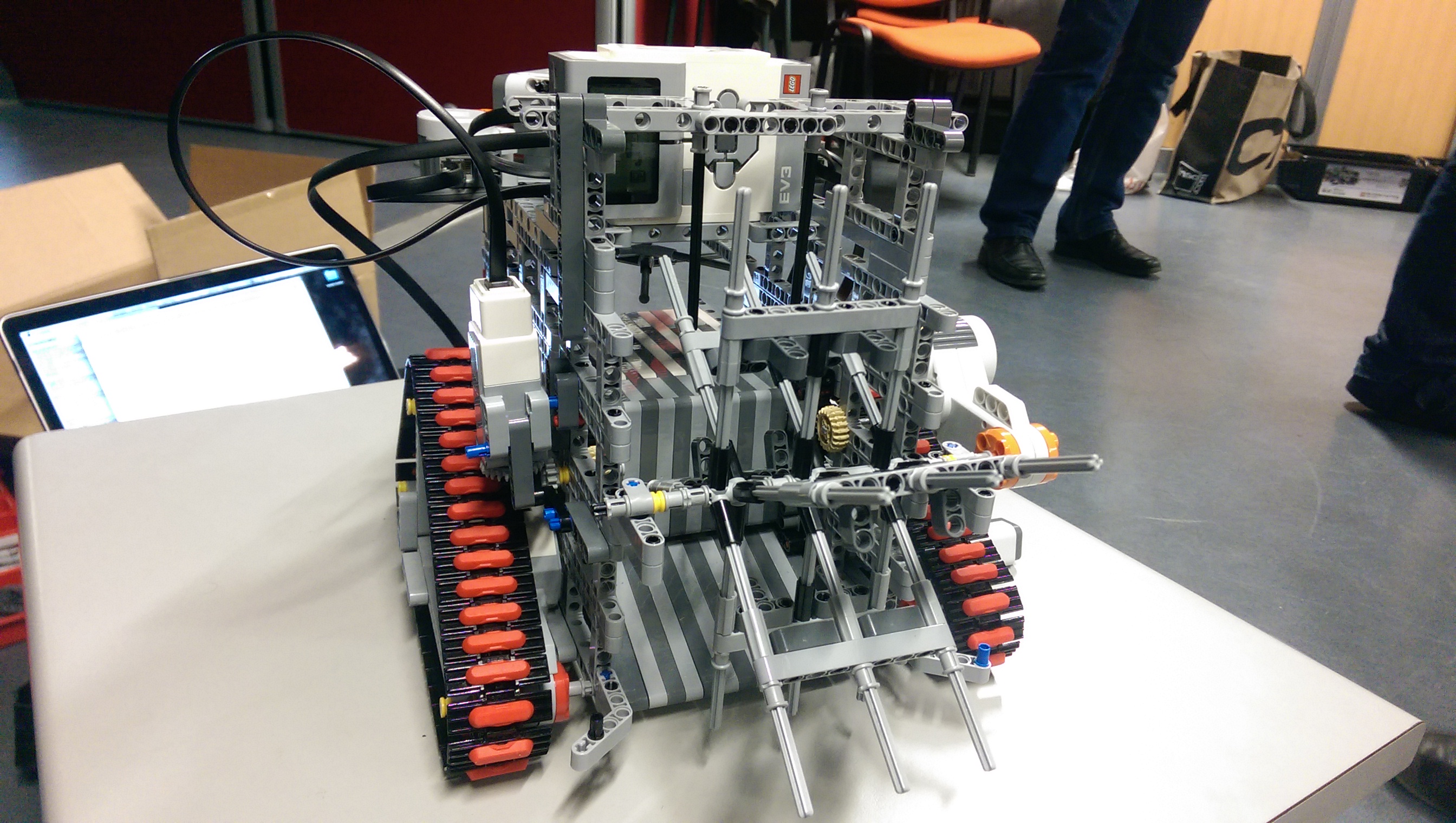
Construction d'un robot ramasseur / éjecteur de balles avec :
- Environnement inconnu (obstacles...)
- Exercices imposés (tri des balles selon couleur...)
Quand ?
Projet basé sur une semaine intensive de programmation (donc hors construction du robot) lors du second semestre de la première année du Master d'informatique.
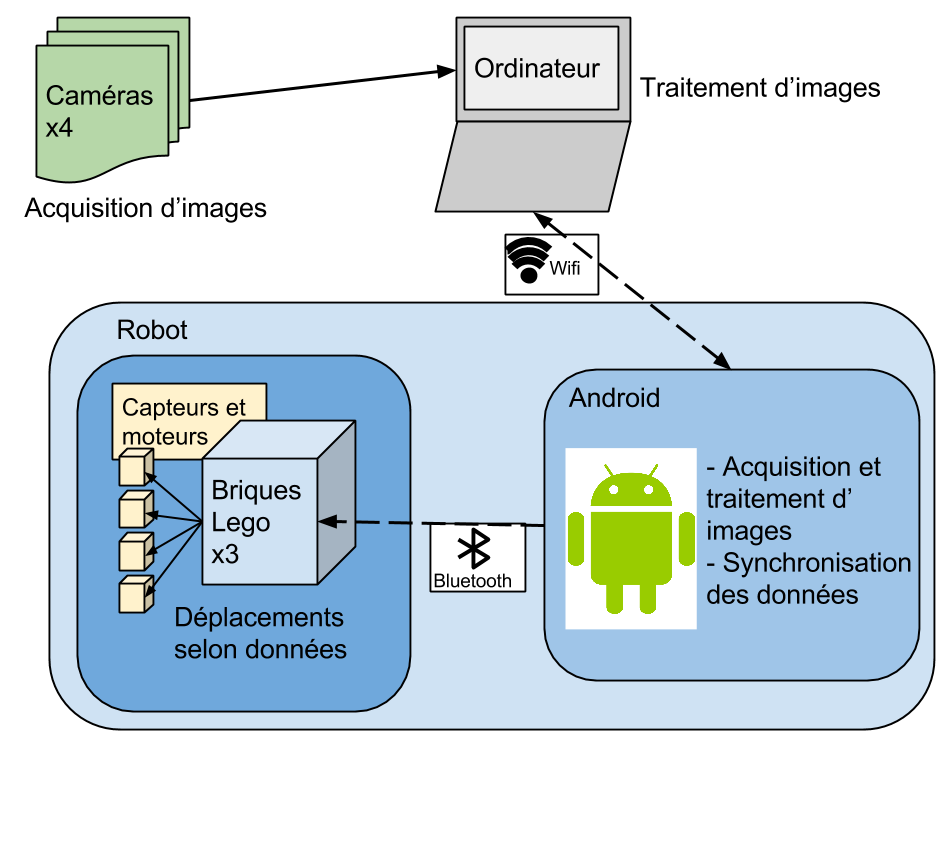
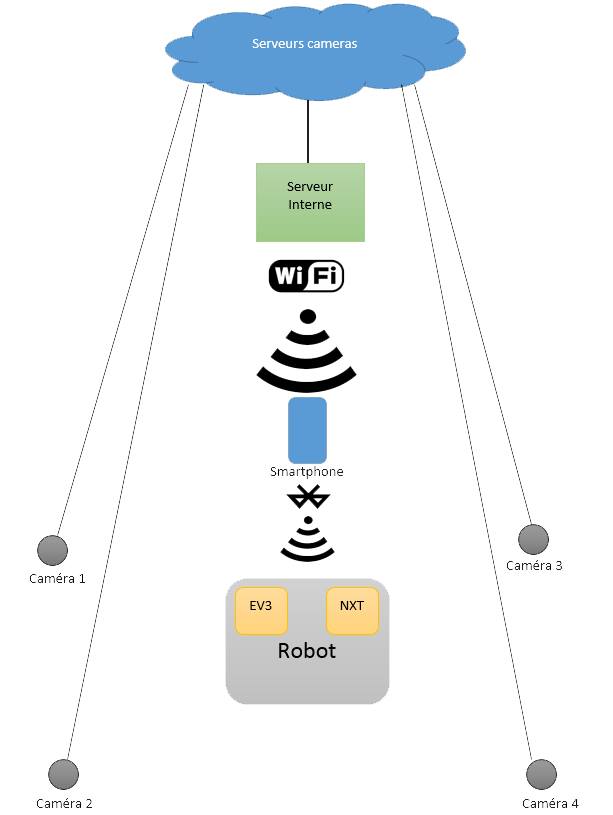
Comment ?
Construction du robot avec Matériel LEGO Mindstorms imposé et smartphone (Android, IOS, WindowsPhone). Accès à un réseau de caméra placées autour du terrain.
Pourquoi ?
Idée principale : Travailler en groupe.
Différentes spécialitées mises en oeuvre :
Analyse d'image (Réseau de caméras et webcam du smartphone), Intelligence artificielle (Déplacement dans le terrain), Réseau (connectivité entre les éléments)